FTC_Textbooks
BluePowerRobotics
目录
所有人必修
机器人硬件简介
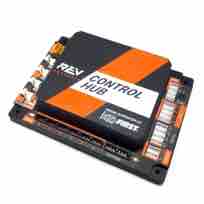
| Control Hub | Expansion Hub |
|---|---|
 |
 |
| 机器人核心部件,用于控制各个执行器(电机、舵机)及传感器(可用手机+EXPANSION HUB代替)。需要使用电池供电;USB-typeC口不可(给CONTROL HUB)供电。 | 用于拓展控制,增加可用舵机、电机数。对于FTC,一辆车最多接12舵机、8电机,因此对于CONTROL HUB只需要且仅允许接入1个EXPANSION HUB(通过RS485接口或MINI USB接口连接) |
| Driver Hub | REV SLIM ROBOT BATTERY |
|---|---|
 |
 |
| 连接车辆以执行程序。通过其中Driver Station软件启动。(可用手机代替)使用手柄操控。通过Start+A/B切换第一/二操作手。该软件界面左下部分控制程序运行。该部分顶端显示当前使用程序;按右侧向下三角切换。 | 机器人电源,为设备供电。镍氢电池,无3C标志,并非充电宝,不受新规限制,可以随身携带上飞机。标称电压12V,是12个1.2V电芯串联组成。本身装有(可在国内买到的)保险丝。 |
| 电机 | (普通)舵机 |
|---|---|
  |
  |
| 通过两种线与机器人控制核心连接。电源线提供动力(黑/红),Encoder线获取旋转圈数(红蓝黑白)。特别地,对于Go Bilda电机,均需要特制转接线;这些线应当在购买时与电机配套。如果需要安装在难以拆卸/接线的位置(虽然不建议这么做),请提前将这两种线接好、拉到易于连接的地方。 | (又称为伺服电机)通过三根线(黑/红/白 或 褐/橙/黄)与机器人控制核心连接。对于180、270舵机,信号线(白或黄)向舵机传输角度;对于360舵机,信号线(白或黄)向舵机传输其旋转速度。若想要控制360舵机角度,可考虑磁传感。特别地,无论是何种范围的控制角度舵机,其实际可用角度大概率小于其标定角度:如170/180,255/270。不建议直接通过控制其旋转时间来间接控制角度。需要注意的是,若想要提高效率,工程部成员应当在安装舵机的时候请程电部成员测试/控制其初始角度而非自做主张安装。 |
| 螺丝 | 螺母 |
|---|---|
 |
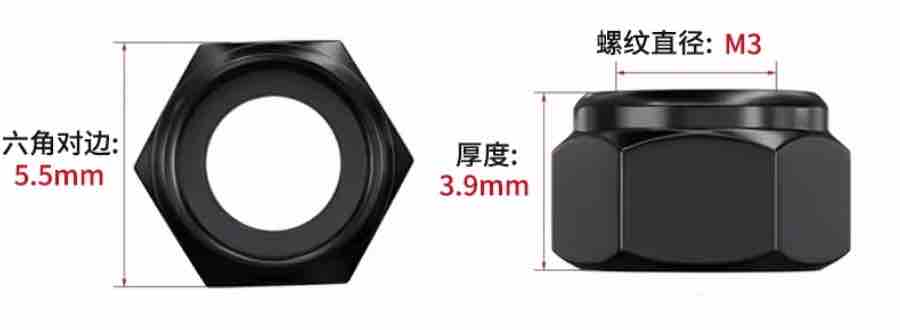 |
对于螺丝,一般都采用M(X)*(Y)的表示方式,其中X表示螺丝(所对螺纹孔)的直径,Y表示螺丝的螺纹部分长度。关于螺丝材质:一般有304不锈钢、8.8级白锌、12.9级碳钢(黑色)(硬度依次提升)。绝对不要使用304的平头内六角螺丝。极其容易损坏。 |
螺帽分为普通螺母、K形螺母、自锁螺母,K形螺母是在普通螺母的基础上安装了一圈K形、可转动的金属片,能给更多螺丝径向的力,自锁螺母是在普通螺母基础上加上一定的尼龙材料,使得它需要一定力才能旋转。这两种理论上都是防滑的,但是K形螺母防滑性能在一般情况下几近于无,好处是便于安装;自锁更难装卸,但更牢固。 |
关于螺丝种类:
一般常用的是M3、M4螺丝/螺母。螺丝头分为多种,一般有:杯头内六角、薄头内六角、平头内六角(其厚度依次下降)圆头、外六角、十字螺丝等等(我们一般不太用)。建议能够统一的螺丝就使用同一型号。
文档写法
本教程采用Markdown标记语言进行编写。
Markdown是一种轻量级的文本标记语言,能够让文档内容通过简单的语法实现排版、美化和结构化,广泛应用于技术文档、博客、项目说明等场景。
常用Markdown语法示例:
标题
在文本前加#,如# 一级标题
# 1
## 2
### 3
#### 4
##### 5
###### 6
分隔符
---
粗体
使用**加粗内容**
:
加粗内容
斜体
使用*斜体内容*
:
斜体内容
列举
使用-或*加空格
1. 1
2. 2
- 1
- 2
1. a
2. b
3. 3
- 1
* 2
* 1
- 2
* 3
- 1
- 2
- 1
- 2
- a
- b
- 3
- 1
- 2
- 1
- 2
- 3
制表
| 1 | 2 | 3 |
|:---:|----:|:----|
|居中|右侧|左侧|
| 1 | 2 | 3 |
|---|---|---|
| 居中 | 右侧 | 左侧 |
插入图片

插入链接
[链接文字](链接地址)
代码块
用三个反引号包裹代码
```Markdown
# 你好
```
更多语法和用法可参考Markdown官方文档。
GitHub介绍
1. 平台性质
GitHub是一个基于Git的代码托管平台,提供:
- 分布式版本控制
- 云端代码仓库存储
- 协作开发工具套件
- 开发者社交网络功能
2. 核心用户群体
- 软件开发人员
- 科研人员
- 技术文档撰写者
- 开源项目维护者
- 技术学习者
3. 主要功能
3.1 代码托管
- 支持各种编程语言的仓库
- 提供无限公共仓库(免费账户)
- 私有仓库协作(付费或教育账户)
4. 学习用法
4.1. 基础工作流程
4.1.1 创建仓库
- 点击右上角”+” → “New repository”
- 填写仓库名称/描述
- 选择公开/私有
- 初始化README(推荐) 官方文档:https://docs.github.com/en/repositories/creating-and-managing-repositories/creating-a-new-repository
4.1.2 基础操作
-
克隆仓库: clone
-
更新仓库: pull
-
提交更改: push
需要注意的是,可以通过下载GitHub Desktop操作或使用Github Mobile直接云端操作。
4.2. 协作功能详解
4.2.1 Pull Request流程
- Fork目标仓库
- 创建特性分支
- 提交修改
- 发起Pull Request
- 代码审查
- 合并代码 文档:https://docs.github.com/en/pull-requests
4.2.2 Issue管理
- 创建:仓库 → Issues → New Issue
- 标签分类
- 分配负责人
- 关联PR 文档:https://guides.github.com/features/issues/
4.3. 高级功能
4.3.1 Pages静态网站
- 设置:Settings → Pages
- 选择发布分支
- 自动部署 文档:https://pages.github.com/
4.3.2 云端开发
- 在线VSCode环境
- 预配置开发容器 文档:https://docs.github.com/en/codespaces